Microcontroller programming with BBC micro:bit
MicroPython Commands
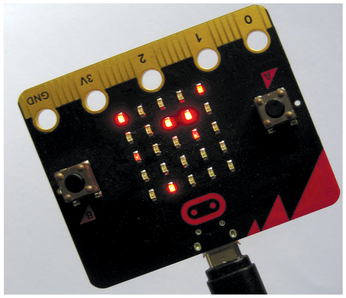
Table 2 lists the most important MicroPython commands for communicating with the micro:bit's sensors. There are commands for the matrix display (Figure 4), the buttons, and the digital input and output.
Table 2
micro:bit Commands
| Function | Effect |
|---|---|
| microbit.display.show(Image.HAPPY) |
Displays a smiley face on the LED matrix |
| microbit.display.show(Image.SAD) |
Displays a frowning face on the LED matrix |
| microbit.display.set_pixel(1, 2, 9) |
Switches the LED at position (1,2) to maximum brightness |
| microbit.button_a.is_pressed() |
Checks whether button a is pressed |
| microbit.button_a.was_pressed() |
Checks whether the button was pressed after switching on, or the last request |
| microbit.button_a.get_presses() |
Counts how many times the button was pressed after the last request |
| microbit.accelerometer.get_x() |
Reads the x-coordinates of the position sensor |
| microbit.pin0.read_digital() |
Reads the digital input at pin 0 |
| microbit.pin0.write_digital(1) |
Sets the digital input at pin 0 |
| music.play(music.RINGTONE) |
Plays a tune if a speaker is connected to pin 0 |
| The command is always preceded by the name of the matching MicroPython library. |
|
The acceleration sensor also serves as a position sensor when the module is at rest. In order not to have to deal with the orientation angles of its three axes, there is the microbit.accelerometer.current_gesture() command. It understands the orientations up, down, left, right, face up, face down, and shake.
A magnetometer with three axes is also available. In theory, it is sensitive enough to detect the direction of the Earth's magnetic field – in practice, it is difficult to do so. The temperature sensor is similar: It also measures the processor temperature. However, under no circumstances should you heat up the board with a hair dryer – be content with measuring the ambient temperature.
The microbin.pin0.is_touched() command connects the digital input via a 10m ohm pull-up resistor. The micro:bit uses this to detect if there is too high of a resistance to ground. Typically, one finger is sufficient for this, while another finger simultaneously touches the micro:bit's ground cable (GND, the large contact at bottom right on the board).
Interface
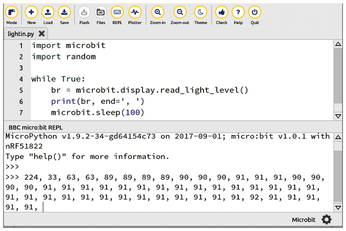
Once flashed, the microcontroller no longer accepts commands. Instead, it switches to communication and outputs its information serially via the USB connection. In Figure 5, the connected micro:bit passes the brightness value to Mu's REPL command window via the print() command. If you close the program, you get direct access to the data.
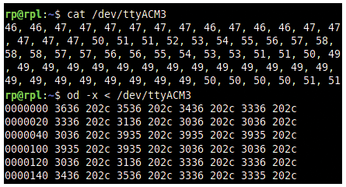
You already know the device name for the serial interface, in our case ttyACM3, as shown in Listing 1. The commands in Listing 4 redirect the micro:bit's output to the terminal window. The cat command returns the brightness value as a decimal number; od -x returns it as a hexadecimal number (Figure 6).
Listing 4
Redirecting Output to the Terminal
$ cat /dev/ttyACM3 $ od -x < /dev/ttyACM3
Hex Files
The Mu editor converts the program code into a hex file. If you disconnect the micro:bit before flashing, the Mu editor enables access to the file and asks where to store it.
The hex file consists of an 8KB MicroPython interpreter. MicroPython is a reduced Python instruction set, which feels like real Python in its basic functions. Additionally, the file contains the program's byte sequence, which the MicroPython interpreter then executes. Finally, the hex file contains a compressed version of the actual program text including comments.
Contrary to what the name might suggest, the hex file is initially a text file: The address and bytes are written out as text (Listing 5). The file therefore shrinks as soon as the system converts the ASCII text into binary numbers. This explains why a hex file of more than 500KB fits into the micro:bit's memory, which has a capacity of 256KB – including the Micropython interpreter. In the end there are about 8KB of physical memory for your own python scripts.
Listing 5
Sample Hex File
:020000040000FA :1000000000400020218E01005D8E01005F8E010006 :1000100000000000000000000000000000000000E0 [...]
Flashing the micro:bit via a connected computer is a more elegant solution. The micro:bit logs on to the computer's filesystem as a USB stick, so you just need to copy the hex file to it. If the micro:bit recognizes the format, it converts the content into a byte sequence and immediately writes it to its flash memory. Otherwise, the file remains in USB memory, just like on a normal memory stick.
Although flashing always overwrites the old data, the data is retained when the power supply is disconnected. The micro:bit executes the program once it has been loaded, as soon as you resupply power.
« Previous 1 2 3 Next »
Buy this article as PDF
(incl. VAT)
Buy Linux Magazine
US / Canada
UK / Australia
Subscribe to our Linux Newsletters
Find Linux and Open Source Jobs
Subscribe to our ADMIN Newsletters
Support Our Work
Linux Magazine content is made possible with support from readers like you. Please consider contributing when you’ve found an article to be beneficial.

News
-
Linux Servers Targeted by Akira Ransomware
A group of bad actors who have already extorted $42 million have their sights set on the Linux platform.
-
TUXEDO Computers Unveils Linux Laptop Featuring AMD Ryzen CPU
This latest release is the first laptop to include the new CPU from Ryzen and Linux preinstalled.
-
XZ Gets the All-Clear
The back door xz vulnerability has been officially reverted for Fedora 40 and versions 38 and 39 were never affected.
-
Canonical Collaborates with Qualcomm on New Venture
This new joint effort is geared toward bringing Ubuntu and Ubuntu Core to Qualcomm-powered devices.
-
Kodi 21.0 Open-Source Entertainment Hub Released
After a year of development, the award-winning Kodi cross-platform, media center software is now available with many new additions and improvements.
-
Linux Usage Increases in Two Key Areas
If market share is your thing, you'll be happy to know that Linux is on the rise in two areas that, if they keep climbing, could have serious meaning for Linux's future.
-
Vulnerability Discovered in xz Libraries
An urgent alert for Fedora 40 has been posted and users should pay attention.
-
Canonical Bumps LTS Support to 12 years
If you're worried that your Ubuntu LTS release won't be supported long enough to last, Canonical has a surprise for you in the form of 12 years of security coverage.
-
Fedora 40 Beta Released Soon
With the official release of Fedora 40 coming in April, it's almost time to download the beta and see what's new.
-
New Pentesting Distribution to Compete with Kali Linux
SnoopGod is now available for your testing needs