Control your backup NAS from the desktop
Programming Snapshot – Remote Backup

© Lead Image © alphaspirit, 123RF.com
To be able to power up and shut down his NAS and check the current status without getting out of his chair, Mike Schilli programs a graphical interface that sends a Magic Packet in this month's column.
As a backup solution, I use a Synology NAS with some hefty hard drives. But because of the strict regulations driven by paranoia and noise-protection goals in the hallowed halls of Perlmeister Studios, the device only runs when actually needed (i.e., when a backup is running). To switch it on when needed, I prefer to push a mouse around a GUI and click occasionally instead of getting out of my chair.
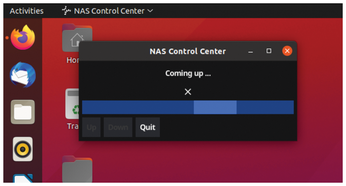
The Syno desktop application presented here (Figure 1) powers up the NAS via the local network at the push of a button and graphically displays the milestones during the boot process with progress bars. As soon as the system has finished booting and is ready for access, it notifies the user.
[...]
Buy this article as PDF
(incl. VAT)