Steampunk portable Rasp Pi lunchbox
Brackets, Brackets Everywhere
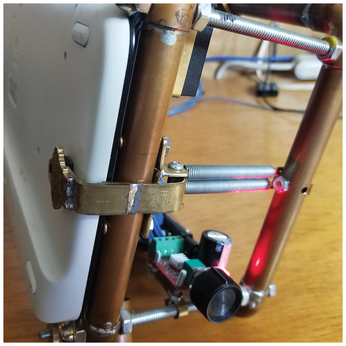
Brass goes hand-in-hand with copper when building steampunk gadgets. I used 3/16-inch thin-wall brass tubing, along with 1/8-inch-thick by 1/4-inch-wide flat brass stock to build the mounting brackets for the Rasp Pi, LCD screen, video driver board, speakers, audio amp, and battery. My trusty antique 100/140-watt Weller soldering gun worked well for bracket construction.
Brass is very easy to solder with rosin-core solder and is a key reason I like using it in steampunk devices. You can cut the brass tubing with the same plumber's tool used for the copper tubing. The flat brass stock is easily cut with either straight aviation tin snips or a Dremel with a cut-off disk. I used a sanding disk on the Dremel and a sanding sponge for edge smoothing.
I also fabricated a spring-operated latch on the front to hold the keyboard in place (Figure 5). A fixed bracket protrudes from the left front of the case to hold that side of the keyboard. A couple of speakers are mounted facing toward the front and slightly behind and on either side of the LCD screen. The brackets are attached to the LCD frame. Interestingly, the open space frame design gives a pleasant 3D effect to the sound from the speakers.
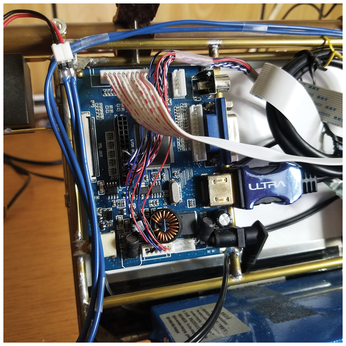
Right behind the LCD screen is the video driver board mounted on its own bracket (Figure 6). The video board runs on a direct 12V line to the power board; it has HDMI, VGA, and composite inputs, and it uses a short HDMI to micro-HDMI cable to hook the board to the Raspberry Pi. A second, very short micro-HDMI to HDMI adapter cable connects to a longer cable for any optional external monitors.
Talk About Power
The lunchbox can operate in two different power modes. Most of the time it's hooked up to a 12V, 1.0A generic wall wart repurposed from an old network router with roughly 12W of power capacity. Measuring the consumption with a Kill-A-Watt meter showed the machine used about 11W in normal desktop operation. It idled back to 5W when the screen was blanked.
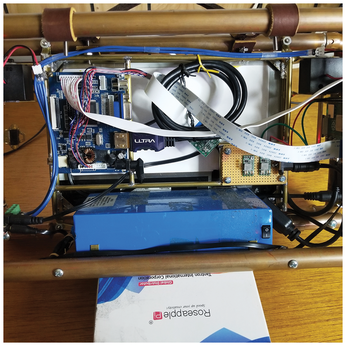
An on-board 15,000mAh super polymer lithium ion battery connected to the main power supply board sits in a bracket at the bottom of the lunchbox frame (Figure 7) and is charged through the 12V wall wart when the Rasp Pi isn't running. A larger capacity wall wart could be used if I needed to charge the battery while also running the Pi.
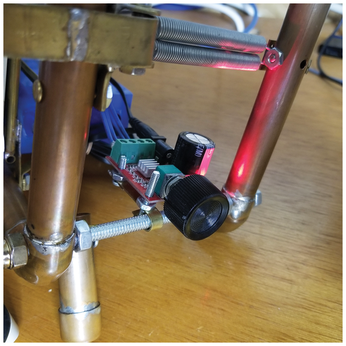
The power supply board has a pair of 12V to xV (up to 3A output) regulators on a small piece of phenolic circuit board. Outputs are selectable by jumpers for from 1.8 to 12V. A female socket on one end connects to the battery. I used a common + /- input power bus setup for ease of future expansion. One regulator supplies a dedicated 5V to the Raspberry Pi. The other regulator is for the steady 12V needed by the audio amplifier board. The color LCD driver board connects to the 12V power directly from the wall wart or battery input power bus. The speakers are powered by a 10W per channel stereo amplifier board with a standard aux cable running to the Raspberry Pi analog audio port (Figure 8).
I plan on adding a switchboard to control all the hardware modules individually. For example, when booting everything at once on the battery, the audio board doesn't initialize correctly because of high current demands. Switching it on after the Pi boots up eliminates that problem. Plus, if I'm not going to listen to audio, the amplifier can be turned off to conserve battery power.
Software
The first piece of software I always load onto my Linux machines is the Synaptic package manager [3] for installing software; apt on the command line works well, too, particularly for regular software updates.
As mentioned earlier, I use the luvcview tool [4] for viewing the video feed from the Hedley's JeVois smart machine vision sensor, which uses neural network algorithms to recognize 1,000 different objects; it superimposes a box around objects at 30 frames a second and provides a real-time data stream of recognized object names and XY coordinates, so you can track faces or things and perhaps move servos on your robot. I've found luvcview to be much more reliable than guvcview or other camera applications.
LibreOffice handles all the office-type jobs you'll ever have on a notebook. I mostly use the Writer word processor and Impress presentation manager. I wrote this entire story with LibreOffice on the lunchbox. The only thing I don't like is that, while touch typing, the mousepad sometimes picks up my trailing right little finger movement when pressing the Delete key. That usually moves the cursor somewhere unexpected, and I end up mistakenly deleting a word or paragraph. I'll have to train myself to cross the left-hand index finger over for deletes.
Overall, I can load just about anything on the lunchbox and it will function properly. It even runs exotic programs like gqrx for software-defined radio listening.
« Previous 1 2 3 Next »
Buy this article as PDF
(incl. VAT)
Buy Linux Magazine
US / Canada
UK / Australia
Subscribe to our Linux Newsletters
Find Linux and Open Source Jobs
Subscribe to our ADMIN Newsletters
Support Our Work
Linux Magazine content is made possible with support from readers like you. Please consider contributing when you’ve found an article to be beneficial.

News
-
Canonical Releases Ubuntu 24.04
After a brief pause because of the XZ vulnerability, Ubuntu 24.04 is now available for install.
-
Linux Servers Targeted by Akira Ransomware
A group of bad actors who have already extorted $42 million have their sights set on the Linux platform.
-
TUXEDO Computers Unveils Linux Laptop Featuring AMD Ryzen CPU
This latest release is the first laptop to include the new CPU from Ryzen and Linux preinstalled.
-
XZ Gets the All-Clear
The back door xz vulnerability has been officially reverted for Fedora 40 and versions 38 and 39 were never affected.
-
Canonical Collaborates with Qualcomm on New Venture
This new joint effort is geared toward bringing Ubuntu and Ubuntu Core to Qualcomm-powered devices.
-
Kodi 21.0 Open-Source Entertainment Hub Released
After a year of development, the award-winning Kodi cross-platform, media center software is now available with many new additions and improvements.
-
Linux Usage Increases in Two Key Areas
If market share is your thing, you'll be happy to know that Linux is on the rise in two areas that, if they keep climbing, could have serious meaning for Linux's future.
-
Vulnerability Discovered in xz Libraries
An urgent alert for Fedora 40 has been posted and users should pay attention.
-
Canonical Bumps LTS Support to 12 years
If you're worried that your Ubuntu LTS release won't be supported long enough to last, Canonical has a surprise for you in the form of 12 years of security coverage.
-
Fedora 40 Beta Released Soon
With the official release of Fedora 40 coming in April, it's almost time to download the beta and see what's new.