Control your Rasp Pi projects with Python’s Tkinter library
The Tinkerer

© Lead Image © agor2012, 123RF.com
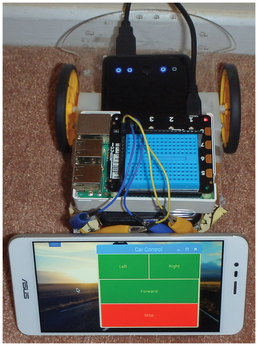
Use Tkinter to control your Rasp Pi projects from a smartphone or tablet.
If you are looking for an easy way to control your Raspberry Pi projects, consider Python's Tkinter library. In about 20 lines of Python code, you can create a graphic program to control a Rasp Pi rover project (Figure 1). This article shows how to create a Python Tkinter application to control the Rasp Pi's General Purpose Input Output (GPIO) pins. I will also show you how to set up a desktop shortcut that you can use to easily launch the application, and I will configure a Virtual Network Computing (VNC) server so that a smartphone, tablet, or PC can control the Rasp Pi remotely.
Python Tkinter Library
Tkinter [1] is bundled with the standard Rasp Pi Python installation. The base Tkinter library contains 17 different widgets that you can use for graphic applications. These widgets can be defined with customizable colors, sizes, text, and commands. There are three geometry managers (Pack, Grid, and Place) that can be used to arrange the widgets. For Rasp Pi hardware projects, I found the Grid geometry manager was a good fit. Listing 1 is a simple test program that presents two buttons in a grid and prints feedback when the buttons are pressed. (Note: Python 2.7 references the library as Tkinter, whereas Python 3 uses tkinter, lowercase). Figure 2 shows this test program with some button feedback.
[...]
Buy this article as PDF
(incl. VAT)
Buy Linux Magazine
Subscribe to our Linux Newsletters
Find Linux and Open Source Jobs
Subscribe to our ADMIN Newsletters
Support Our Work
Linux Magazine content is made possible with support from readers like you. Please consider contributing when you’ve found an article to be beneficial.

News
-
KDE Linux Drops AUR
KDE Linux developers have dropped the Arch User Repository from the build pipeline due to security concerns; other distributions should consider doing the same.
-
California May Exempt Linux from Its Age-Verification Law
After backlash from the Linux community, California may be backing off on its promise to force all operating systems to verify age, but one platform may still have to comply.
-
Another Logic Bug Found in Linux Kernel
Qualys has discovered a vulnerability in the Linux kernel that can be used to elevate standard user privileges.
-
Ubuntu Core 26 Offers Game-Changing Enterprise Features
Ubuntu Core 26 could be a game-changer for organizations looking for increased security and reliability.
-
AI Flooding the Linux Kernel Security Mailing List
AI is giving Linus Torvalds a headache, but not in the way you might think.
-
Top Priorities for Open Source Pros Seeking a New Job
Professional fulfillment tops the list, according to LPI report.
-
Container-Based Fedora Hummingbird Designed for Agent-First Builders
Fedora Hummingbird brings the same approach to the host OS as it does to containers to level up security.
-
Linux kernel Developers Considering a Kill Switch
With the rise of Linux vulnerabilities, the kernel developers are now considering adding a component that could help temporarily mitigate against them… in the form of a kill switch.
-
Fedora 44 Now Gaming Ready
The latest version of Fedora has been released with gaming support.
-
Manjaro 26.1 Preview Unveils New Features
The latest Manjaro 26.1 preview has been released with new desktop versions, a new kernel, and more.